 Français
Français
 English
English
Nouveautés et prototypes
Retrouvez ici le calendrier de
La Peugeot 205 : ToDo Peugeot 205
Autonom CAB : ToDo Autonom CAB
Le pourcentage étant la progression générale du module en question. Du plus récent au plus ancien.
[12 Avril 2026] - PathDrawer - Logiciel d'édition de cartographies - 70%

Logiciel PathDrawer
J'avais précédemment annoncé en Décembre 2025, la conception du module "PathTracer" issue d'images PNG de cartographie «éditable avec n'importe quel logiciel de dessin en utilisant les codes couleurs.»
Afin de simplifier et de standardiser l’édition des trajectoires, j’ai finalement choisi de développer un nouveau logiciel (en C# WPF, en utilisant les API DirectX pour la projection dessin vectoriel et rendu 2D), spécialement conçu pour la création de parcours et de signalisation routière.
PathDrawer permet ainsi de dessiner des trajectoires, de positionner des zones de vitesse, des arrêts STOP, des priorités à droite, des cédez-le-passage, ainsi que d’autres éléments de circulation, dans un environnement pensé dès le départ pour cet usage.
Contrairement à un logiciel de dessin classique, les lignes générées par PathDrawer suivent une courbure plus réaliste, dite “mécanique”, calculée à partir du positionnement des points. Cela permet d’obtenir des rails de déplacement plus fidèles au comportement réel d’un véhicule.
Le même principe s’applique à la signalisation : les panneaux et marquages comme les STOP, les cédez-le-passage ou les zones de priorité avec des dimensions, des formes et des couleurs standardisées. Là encore où un simple logiciel de dessin ne peut pas faire.
[06 Janvier 2026] - Simulateur calculateur EVCU EVE-SYSTEM - 90%

Tesla de CARLA SIMULATOR piloté par un EVCU EVE-SYSTEM (E-NA010-1905) simulé
J’ai réussi à reproduire environ 60% du comportement de l’EVCU EVE-SYSTEM embarqué dans les robot-taxis Autonom CAB Batch 2 en python.
L’inertie thermique des capteurs de température, le mouvement cinétique ainsi que le diagramme de séquence ont été répliqués au plus près pour mimétiser le comportement mécatronique du véhicule.
Le projet a été poussé loin pour intégrer la consommation électrique du moteur et des pompes hydrauliques à chaque phase de freinage, l’allumage du feu stop, la génération de chaleur du variateur et du moteur influencée par la température extérieure et la vitesse, jusqu’à la température intérieure influencé selon si la porte est ouverte ou fermée.
La simulation de charge/décharge batterie est elle aussi prise en compte sur une base d'une batterie de capacité de 35kw.
Le logiciel se structure en trois modules :
-
Une interface graphique permettant le pilotage manuel avec retour visuel
capable d’interagir avec CARLA SIMULATOR via les trames CAN NAVYA / DIDO ci-dessous. -
Un module “CAN NAVYA” reproduisant environ 95% des trames CAN
EVCU EVE : groupe motopropulseur, rotation roues/RPM, capteur solaire, températures, éclairage, pression hydraulique, etc.
Batterie EVE : consommation, tension, SOC/SOH, modes… -
Un module “CAN DIDO” reproduisant 100% des trames CAN
Direction assistée : angle volant, consignes et retours
Porte coulissante : états, position, tension, consommation, commandes et acquisitions
[23 Décembre 2025] - Nouveau module "PathTracer" - 80%

Decision suivant une trajectoire définit grâce à une cartographie réalisé par "Felly PathTracer"
Felly PathTracer est un outil interne développé en C# sur DirectX Tzu3D (basé sur la même architecture sur DECISION) Mais avec pour seul rôle, permettre de capturer, tous les mètres, la perception issue des lidars du véhicule en s’appuyant sur la fusion GPS (SBAS) / IMU afin d’obtenir une localisation assez fiable.
La scène ainsi constituée est sauvegardée sous forme d’image PNG avec une coloration codifiée, accompagnée d’un fichier .META contenant les informations associées (GPS, résolution, corrections, etc.).
Ces cartes peuvent être ouvertes dans n’importe quel éditeur d’image : on y trace la trajectoire, le sens de circulation, les bordures, les marquages au sol, les zones de vitesse, les priorités, les STOP, etc.

Decision suivant une trajectoire définit grâce à une cartographie réalisé par "Felly PathTracer"
DECISION intègre désormais un mode de conduite autonome baptisé PathTracer, capable d’importer ces cartes générées.
Jusqu’à présent, le comportement était comparable à celui d’un robot aspirateur, avec parfois un mouvement imprévisible, elle pouvais dans le pire des cas "prendre la fuite" ;)
Désormais, on importe simplement l’image PNG (avec son .META). Une fois le mode autonome PathTracer activé, le véhicule rejoint automatiquement la trajectoire dessinée, en évitant les obstacles à faible vitesse, puis, une fois aligné, il suit fidèlement le chemin défini, avec les consigne de vitesse codifié sur le PNG.
Bridé volontairement à 5km/h le temps des essais, la bonne nouvelle, c'est que ça fonctionne 🤘
[29 Novembre 2025] - Deux Autonom CAB à Transpolis, près de Lyon

Exemplaires d'Autonom CAB de série n°09 et 10, précédemment stocké à Marseille sont désormais stockés à Transpolis
Désormais dans le lieu parfait pour les expérimentations, mais également dans l'éventualité d'un début de processus d'homologation.
Ils vont pouvoir enfin avoir une piste d'essai dédié dans l'objectif de préparer un événement cet été 2026 (si tout se passe bien) je vous tiens informé dans les réseaux dès que je peux en parler d'avantage.
[Octobre 2025] - Publication vidéo "🚕 A PROPOS - J'AI RACHETÉ 3 ROBOTS TAXI | CHAPITRE 1"

Pour voir la vidéo, cliquer sur l'image
Cette vidéo d'introduction qui va « introduire une série de vidéos » présentant mes bricolages, tests, et mes galères, généralement filmées, GoPro à la tête
[1er Avril 2025] - L'Autonom CAB de retour dans sa ville natale, Lyon

Exemplaire d'Autonom CAB de série n°12 en cours de restauration et rétrofit logiciel à Lyon - 2025
De retour à Lyon, le CAB va bénéficier d’une légère remise en état mécanique (voir les photos ici, mais l’essentiel des efforts portera sur la reprise des travaux de rétro-ingénierie, notamment la refonte complète du logiciel de pilotage autonome. Actuellement, le CAB embarque le FELLY-SOFTWARE, le même que celui utilisé sur la Peugeot 205 autonome. Les deux systèmes sont quasiment identiques, à l’exception du module "ACTION", qui a été ré-adapté spécifiquement pour communiquer exclusivement via le bus CAN, ainsi que de l’interface graphique et des mécanismes logiciel de pilotage propres au CAB.
Les autres modules "PERCEPTION", "DECISION", etc.. restent strictement identiques à ceux de la Peugeot, ce qui signifie que le comportement général du véhicule, sa capacité à percevoir son environnement et à prendre des décisions en temps réel reposent sur les mêmes fondations logicielles. Cela nous permet d'assurer une certaine continuité dans les développements.
La finalité est d'entamer les démarches d'homologation ; avant tout, un expert en homologation va venir expertiser le véhicule afin d'évaluer sa conformité aux normes en vigueur et déterminer les ajustements nécessaires, les coûts
[8, 9, 10 Novembre 2024] - Salon Epoqu'Auto 2024

Salon Epoqu'Auto 2024
Un salon de dingue! J'ai pu mettre en démonstration statique le véhicule au grand publique
Un grand Merci à la FFVA (Gilles BOSSEN) et à mon équipe Justin et Augustin de La_roue_Libre_205
[30 Mai - 1er Juin 2024] - J'ai récupéré 3 Navya Autonom CAB

Chateauroux CNTS 2024
J'ai acheté 3 Navya Autonom CAB sur le quel j'ai participé à leur conception, tests entre 2017-2019 et leur déploiement à châteauroux en 2019.... 4 ans plus tard, finalement je repars avec 😁
Une refonte du logiciel en lien avec FELLY-SOFTWARE de la Peugeot 205 sera à l'étude 😎
[Janvier 2024] - Dernières vidéos YouTube - 205Africa Vesoul Stellantis
Ci-dessous les deux dernière vidéos publiés sur YouTube. Puis clac de fin pour plusieurs mois
afin de préparer une version 2.0
Chapitre 10

https://www.youtube.com/watch?v=jZ76JwlkW3U
Chapitre 11

https://www.youtube.com/watch?v=NEagf07ROok
[30 Septembre 2023] - 205Africa à Vesoul Stellantis

Vesoul Stellantis - 205Africa - Septembre 2023
Un weekend d'enfer! J'ai à nouveau présenté l'intégralité de la Peugeot 205 autonome au publique, je reste encore bouche bée sur la manière dont ce véhicule attire l'attention, c'est un plaisir monstre à tout expliquer, dévoiler les entrailles du projet !
J'ai pu rencontrer de très bonnes personnes que je suivais déjà sur leurs réseaux tel que 205TotalAventure, Pascal DRAGOTTO, La Clé de 13, Hit the Road et j'en cite... Mais surtout, après bien 15 années, je rencontre pour la première fois Wahid GARCI, le fondateur du moteur de jeux vidéos Tzu3D dont le projet Felly est basé.
Je remercie beaucoup Fanny, son équipe 205Africa ainsi que Stellantis Vesoul ! Un weekend sacrément chargé d’activités !
Merci également à tous les Youtubeurs et Instagrameurs, pour cet élan de solidarité pour que ce projet soit présent à Epoqu'Auto en Novembre 2023 ; ceux cités plus haut, mais également à HoBordel, Ticket For Road, les_merguez_du_hobbit,
Plus qu'à croiser les doigts pour que Epoqu'Auto acceptent ma venue tant qu'exposant. 🙌
[16 Septembre 2023] - Présentation 40 ans Peugeot 205 à Montmorot

Montmorot - JMJ Automobile - 2023
Petit show de Peugeot 205 à JMJ Automobiles, situé à Montmorot, près de Lons le Saunier, il y avait un petit concours « d’élégance » où les visiteurs peuvent voter librement, et j'ai terminé 3ème.
Comme à Sochaux en Juillet 2023. nous avons reçu énormément de personnes curieuses, nous avons pu expliquer son fonctionnement de A à Z, je suis très rassuré et satisfait qu'à première vue, ce véhicule étonne et plaît à beaucoup de personnes dans le public dont certains se prend en photo à côté. 👌
Le projet va sont poursuivre le développement pour être prêt pour l'évènement 205 Africa Raid du 30 septembre au 01 octobre 2023 à Vesoul.
[13 aout 2023] - Début réécriture du Dynamic Path Tracing - Décision 60%

Tests dans un garage sous sol
Suite à l'invitation sur Vesoul pour l'évènement 205 Africa Show, et notamment au fait qu'il serait très potentiellement possible de réaliser une démonstration en autonome, j'ai donc décidé de réécrire cette fonctionnalité PathTracing, présent dans le module décision.
Et pourquoi ?
Étant donné qu'il s'agit de la première version qui a été codé, testé dans un garage en sous-sol, et qu'il n'est pas efficace voir pire en extérieur, cette opération est légitiment nécessaire. Nouveau challenge!
Pour rappel, cette fonctionnalité "Dynamic PathTracing" permet tracer un itinéraire "mécanique" par rapport à la perception de son environnement, l'algorithme à été réécrit, beaucoup d'améliorations commencent à arriver, il y aura au moins pour 1 mois de travail !
[7-8-9 Juillet 2023] - Présentation aux 40 ans de la Peugeot 205 - Sochaux

Remerciements à Le Nouvel Automobiliste pour ses photos
Le véhicule a été présenté en statique, système Felly, Lidar Ouster, Velodyne et volant tournant, avec un écran et un 3ème lidar Velodyne déporté.
Nous avons reçu énormément de personnes curieuses, nous avons pu expliquer son fonctionnement de A à Z. Nous avons également reçu la visite de Xavier CRESPIN et Gaêl COLIN, un immense honneur!
Je remercie les organisateurs de l’évènement les journalistes photographes et bloggeur(euse) Marie LIZAK, AutoplusMag, DirectAuto C8 et encore...
Ainsi qu'à Florian LAGARRIGUE, Timothée LUSSIAUD, Manon MILLET et à mon entourage d'avoir activement été présent pendant ces 3 jours.
J'ai été invité à présenter à nouveau la Peugeot à Vesoul pour l'évènement 205 Africa Raid du 30 septembre au 01 octobre 2023.
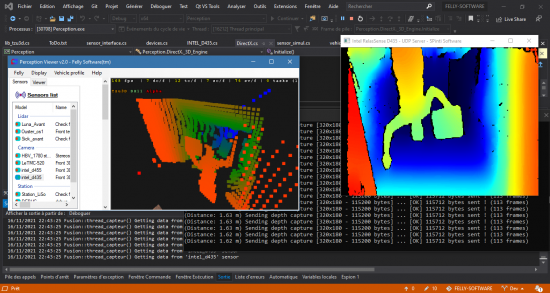
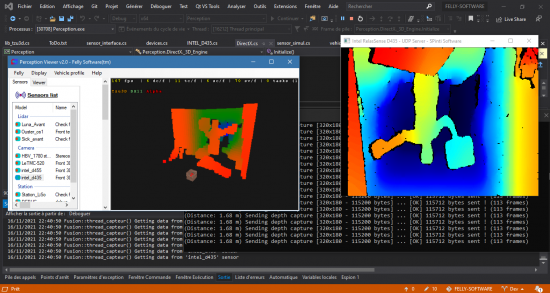
[26 Avril 2023] - Première version de "Felly Vision v2.0" - Module Vision 40%

Premiers tests exécutés depuis deux caméra fisheyes.
Ce nouveau module va permette de "labelliser" les obstacles formelles détectés par les Lidars, radars, sonars (représentés dans le module Perception) afin de déterminer le meilleur comportement à adopter depuis le module de décision.
Le cadre passe sur des tons rouge quand l'entité détecté est proche de la caméra, et des tons verts / bleutés quand il est éloigné.
Avoisinant 2 à 5 passes de détections complètes par secondes, avec environs 400ms de retard, pour une première version ... c'est un bon début!
[21 Avril 2023] - Publication vidéo "🚗 A propos - J'ai réalisé une 205 autonome | PARTIE 1"

Pour voir la vidéo, cliquer sur l'image
Cette vidéo d'introduction qui va « introduire une série de vidéos » présentant mes bricolages, tests, et mes galères, généralement filmées, GoPro à la tête
[20 Décembre 2022] - Réécriture du dynamic path tracing - Decision 50%


Tests en garage sous-sol - segmentation des zones accessibles. Test via Lidar Ouster & Kinect 360
Le module décision se fait peau neuve, désormais, plus besoin d'une trajectoire, ou angle de direction programmé, relativement au gabarit, le véhicule peut générer lui-même sa propre trajectoire dans des lieux inconnus même s'il n'y a aucune informations de destination, ni de GPS. Cependant, le module de perception devra être amélioré. En effet il serait nécessaire de "merger" les informations de segmentation supplémentaire provenant de la vision caméra RGB pour délimiter (statique ou dynamique) les bordures de routes non visibles au lidar.
[31 octobre 2022] - Refonte totale du VCU et composants d'alimentation - VCU 60%

Sa première sortie en extérieure depuis 2020
L’électronique du VCU (Vehicle Control Unit) ainsi que le firmware (logiciel) à été entièrement réécrit de zéro. Précédemment sur Arduino Nano (qui était un challenge), nous avons atteint ses limites physiques en nombre d'entrés/sorties. Nous sommes donc passés sur un microcontrôleur ATMega2560. Ce VCU, désormais multi-thread, il est capable de gérer indépendamment les pédales, la direction, panneaux LEDS, ainsi que différents capteurs (2x angle de direction, angle des pédales, température...), ainsi que la communication avec le PC. Cette refonte a permis de finaliser la fiabilisation de la direction électrique, désormais précis à 1,5° près !

Boitier d'alimentation stabilisée fait maison
Un boitier d'alimentation stabilisée à été fabriqué, afin de répartir avec des connecteurs fiables, l'alimentation électrique sur différents composants primaire de FELLY, avec des protections fusible, elle même alimentée par une deuxième batterie 12v indépendante de la primaire servant au véhicule.

Intérieur actuel. Les composants primaires occupe temporairement le siège passager
Un écran articulé tactile désormais faisant partie intégrante du tableau de bord de la Peugeot, permettant d'interagir avec le PC d'une manière plus ergonomique !
Il resterai plus qu'à fiabiliser l'embrayage, le frein et l’accélérateur.
[17 Mai 2022] - Expérimentation - La première Peugeot 205 en autonome! - Fusion 50% & Perception 85% & Action 50%

Expérimentation dans un garage sous-sol en lidar seul
La toute première expérimentation d'une Peugeot 205 ayant la capacité de conduire sans l'aide du conducteur.
Vielle et usée, l'arbre de direction à dû être restaurée et améliorée avant de l'adapter avec une direction assistée électrique provenant d'une Bluecar de chez Autopuzz. Cette direction est connecté à un calculateur fait maison qui reçoit les ordres depuis un PC exécutant Felly-Software utilisant un seul lidar pour cette première démonstration.
Un début d'une grande aventure : Vidéo de démonstration
[06 Mars 2022] - Perfectionnement de la fusion multi-capteur - Fusion 40% & Perception 82%

Test et calibrations manuel pour la fusion de caméras 3D et d'un lidar Ouster dans une Bluecar
Avec mon ami Florian Lagarrigue, nous avons pu améliorer la précision des impacts de points pour que les autres capteurs puisse s'accorder sur les points en commun. Il reste cependant des améliorations à faire! Nos avis sur quelques problématiques ont été fructueux 👍
Vidéo ici
[05 février 2022] - Améliorations - Perception 80%

Test de labelisation + modèle 3d des capteurs en fonctionnement
Notre collaboration maintient une belle trajectoire pour Felly, en effet, le moteur 3D DirectX Tzu3D de Wahid GARCI se perfectionne de plus en plus, avec des fonctionnalités "sur-mesures" pour une utilisation générique qui pourrons être utilisées dans d'autres domaines. Beaucoup de gain d'FPS permettent d'avoir le rendu 3D beaucoup plus fluide. Une belle amélioration de la projection de nuages de points sur les lidars 360° tel que le Ouster OS1 ! Le driver à été réécrit en destination de la plateforme C#.net.

Aperçu d'une projection 3D du lidar Ouster OS1 (16 couches) parking Villeurbanne (petit bug de coloration)
L'implémentation des modèles 3D des capteurs fait maison! La projection des nuages de points sont explicitement relatives à la position et orientation du modèle 3D du capteur. En plus de pouvoir le "labeliser" pour l'identifier, ceci qui permet lors du réglage physique + logicielle, d'avoir la meilleure approche réaliste des condition réelles.

Exemple de deux modeles connectés sur la scène, tel qu'une microsoft kinect xbox 360 et un lidar ouster
Le petit plus c'est que ces capteurs peuvent être facilement "logiciellement" déplaçables/orientables/focusable/scalables. Une calibration automatisée est en cours d'implémentation, elle permet de placer automatiquement les capteurs sur le véhicule avec minimum deux qui visualisant un quart d'une scène en commun.
[29 novembre 2021] - Implémentation de la Microsoft kinect xbox 360 pour les contributeurs - Perception 50%
Après l'implémentation avec succès de la nouvelle mise à jour du moteur 3D Tzu3D sous DirectX11 en cours de test aux côtés du créateur, afin d'ouvrir l'accès facile à la contribution au code source de Felly-Software, nous avons pensé qu'un capteur 3D "physique", en sa possession (au lieu du mode simulation) semble plus judicieux pour le (futur) développeur(euse).
Les capteurs 3D de bonne qualité sont plutôt onéreux, nous avons remarqué que sur les sites marchands, il y a beaucoup de particuliers qui se séparent de leur kinect xbox360 à très bas prix, pourquoi pas les recycler ?
Alors nous avons eu l'idée d'implémenter le driver de la kinect sur Felly afin que tous les (futurs) contributeurs puisse tester physiquement chez eux (indoor) le logiciel Felly. Pourquoi pas s'amuser avec des petits projets sur roues à la maison !
Chose faîte : vidéo

Aperçu d'une simple projection 3D avec la kinect sur Felly-Software - Lons-le-Saunier
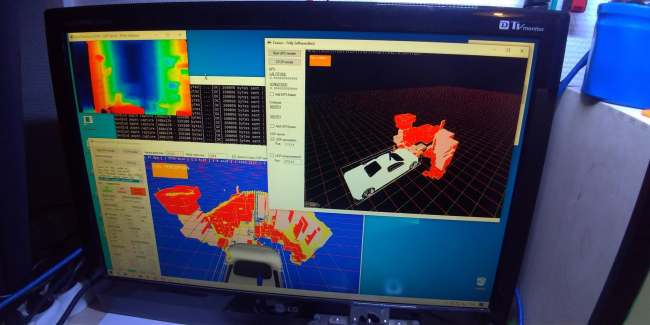
[16 novembre 2021] - Nouvelle mise à jour du moteur DirectX Tzu3D - Perception 30%
En contact avec le développeur, cette nouvelle mise à jour de Tzu3D permet de perfectionner la projection des nuages de points avec plusieurs instances de lidars et de caméras 3D. Une mise à jour qui se perfectionne, où il est possible d'afficher une infinité de nuages de points (Bien plus que 2 000 000...)
Nous nous forçons à utiliser de vieux GPU (Intel HD4000, GTX970 ...) pour perfectionner le code avant de perfectionner le matériel. (GTX1050Ti, GTX1080Ti ...)
Une simple projection 3D d'une caméra avec de 40k nuages de points a 160 fps
[16 octobre 2021] - Premier essai en autonome avec la Bolloré Bluecar
L'essai à été réalisé sur un terrain près de l'aéroport de St Priest, le but étant de tester simplement l’accélération et la tenue de trajectoire.
Assisté par un STM32F4 contrôlant pédale + volant, le tout orchestré depuis un PC qui à le rôle de percevoir son environnement et transmettre les informations de vitesse et angle de direction.
Le logiciel de guidage n'étant pas une perfection, la reprise du projet Felly avec une nouvelle mise à jour du moteur 3D est en cours de réflexion.....
Retrouvez-donc un aperçu de l'essai du prochain montage « J'ai acheté une bluecar » ici : vidéo
[13 octobre 2021] - Reprise du projet
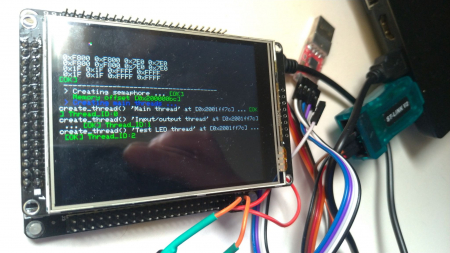
Après 9 mois d'arrêt, le projet reprend petit à petit !
Au programme, le développement d'un calculateur (E)VCU expérimenté sur un carte électronique STM32F4. Équipé d'un CAN BUS, Ethernet, firmware fait maison sous une version minimale de FreeRTOS (multithreading à préemption + temps réel). Ce dernier équipera la Peugeot 205, dépourvus de calculateur. Avec quelques modifications mécaniques, ce projet serait donc axé sur la possibilité de contrôler le carburateur (air/essence), le frein, les feux, clignotants du véhicule. Ainsi que la robotisation de la boîte à vitesse et de la direction.

La préfecture du Rhône, Auvergne Rhône-alpes n'a pas encore des éléments concrets (n'existe pas encore) sur la légalisation de circulation sur voie publique d'un véhicule ancien modifié et autonome. Nous avons lancé une requête qui est en cours.
Les modifications mécaniques seront donc pour le moment, modulaires (possibilité de retirer facilement les éléments physique/électrique non-homologué) pour des raisons évidentes autour de la loi Française concernant un véhicule modifié. Le passage aux mines serait donc une étape à prévoir quand la préfecture aura traité le sujet. L'installation mécanique serait donc enfin définitive. ✅
[7 Janvier 2021] - Mise en pause du projet
Beaucoup de changements !
SPinti Software est en cours de conversion vers une SAS (Société Action Simplifiées). Notre projet ThiefShell prend de plus en plus d'ampleur, afin d'assurer notre budget, ainsi que du gain de temps pour son industrialisation et sa commercialisation, nous avons décidé de mettre en pause le projet de Felly. Jusqu'en octobre.
Les dépenses pour le projet Felly (Capteurs, cartes électroniques...) ne peuvent pas être assurées en parallèle.
Le logiciel Felly reprendra donc ses activités de développement d'ici la fin d'année 2021.
A très bientôt ! 😉
[12 décembre 2020] - Réécriture du module de perception
Afin d'exploiter pleinement les shaders des GPUs, nous avons réécrit le module de perception de zéro en se basant sur le moteur 3D de bas niveau Sokol/GZE sous DirectX 12.
Tzu3D sera finalement exploité pour le module de fusion 3D, moins gourmand en puissance.
Nous développons une solution qui permet d'exploiter Felly sur des GPUs d'anciennes générations tel que les série Nvidia GTX 700 de 2014 afin d'assurer un code très optimisé pour faire face à la loi de Moore et l'évolution des GPU sur du très long terme. Ce qui permet d'explorer des solutions a très bas coût et ne pas se reposer sur les dernières générations de GPUs sans optimiser le code.
[07 Décembre 2020] - Début de création du module fusion
Ce module va permettre, aux informations perçues tel que le module Perception (capteurs, lidar, sonar), Navigation (GPS, boussole, gyroscope), Vision (Reconnaissance IA, tracés au sol...), d'être FUSIONNEES dans ce module. Le rassemblement de ces informations va permettre au module décision d'avoir tout ce qu'il faut pour fonctionner correctement.
[01 Décembre 2020] - Création d'une table d'essai roulante
Ce prototype équippée d'une batterie, va permettre de tester le logiciel et ses petit ajustement dans les locaux ou dans une petite cours, sans à devoir sortir uns des véhicules du garage. Il comporte un moteur électrique, d'une direction assisté par un contrôleur programmable, d'un PC, GPU Nvidia, chargeur de batterie interne, et des capteurs (Lidar, sonar, caméra 3D)

[Novembre 2020] - Première intégration du générateur d'entités
Cette fonctionnalité permet de transmettre le moins d'informations possible au module de décision sur les détails qui n'ont pas d'importances. Ce qui permet par exemple de transformer le relief détaillé d'une voiture en un gros cube rectangulaire qui est une informations suffisante. Sur l'image du centre, on peut perçevoir l'angle d'une porte (entouré en noir), comportant une cinquantaines de point d'impact. Ces points sont donc alégés par un cube. Et ceci pour tout le reste !
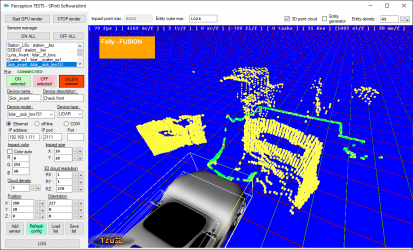
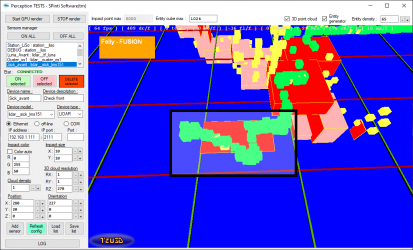
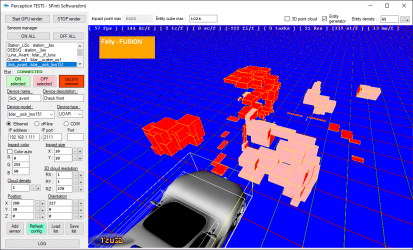
Résultat : La carte graphique du système est beaucoup moins saturée par les détails sans importances