 Français
Français
 English
English
Dernière mise à jour : 06 Janvier 2026
Felly comprend la perception 3D la visualisation par IA les prise de décisions le contrôle du véhicule la gestion multi-capteurs
Felly Autonomous Vehicle Software est un « kit-prêt-à-installer » permettant d'effectuer un rétrofit de véhicule moderne et ancien en véhicule autonome.
Ce projet à destination de l'open source à pour but de faciliter l'accès aux technologies modernes de véhicule autonome, pour tous et pour tout types de véhicules terrestre.

Les deux cobayes du projet, Peugeot 205 essence et BlueCar eléctrique
--

Et les 3 derniers cobayes électriques du projet, Navya Autonom Cab
![]()
Un ensemble de logiciels Felly
Perception 3D, décisions, communication, blackbox, IHM graphique...
entièrement développé de zéro en langage C#, C et C+
--

Un ou deux Mini PC embarqué - Windows 10 IoT
Exécutant les logiciels Felly + communication avec le calculateur VCU
--

Un calculateur VCU équipé d'un processeur ATMega32
Robotise et pilote le volant, les pédales, et les feux
monitore le véhicule et communique avec le mini-PC via CAN/RS232
avec une carte électronique + firmware entièrement fait maison
--

Un ensemble de caméras et capteurs
Lidars 3D et 2D, sonars, radars et caméras
Permettant de percevoir tout autour du véhicule jusqu'à 50m
--

PowerBox, boîtier d'alimentation électrique
Répartition alimentation électrique, filtrage et protections
afin d'alimenter les équipements FELLY (PC, capteurs...)

Pas dépendances avec des librairies et logiciels dominants
Pas de PCL, ni de RTmaps, ni de ROS, ni d'OpenAI ni quelconque code Python.
et donc ni de mises à jours propriétaires et licences payantes
A l'exception des API constructeur de certains capteurs
code nativement compilé pour plateformes 64 bits, dépendant de NetFramework 8 et Windows 10/11
--

Moteur et gestion de la 3D
Reposé sur le moteur jeux vidéos 3D Tzu3D sous DirectX 11/12
permettant d'exploiter les performances des cartes graphiques (GPU)
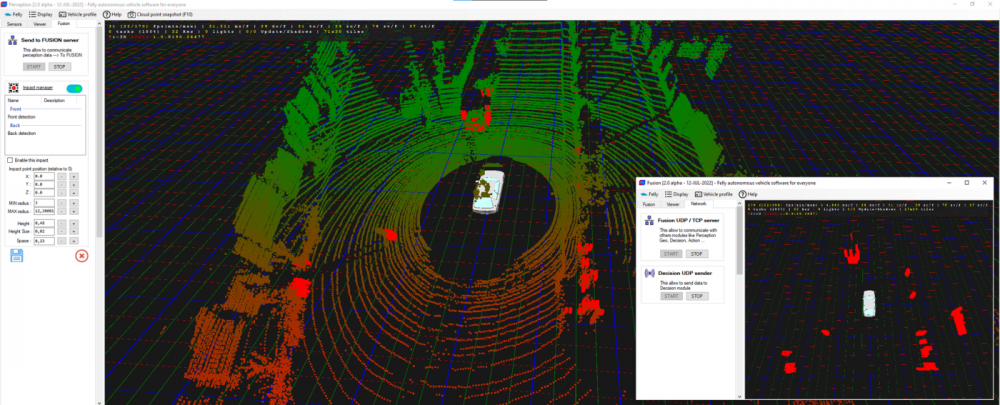
Visualisation d'impacts (rouge) depuis une capture d'un Velodyne-128
Pour plus d'informations nous vous invitons à consulter Le projet & nouveautés

La première Bolloré Bluecar autonome

La première Peugeot 205 autonome




![]()
![]()
![]()
