 Français
Français
 English
English
Last update : May 02th 2025
Felly includes 3D perception AI visualization decision making vehicle control multi-sensor management
Felly Autonomous Vehicle Software is a "ready-to-install kit" for retrofitting modern and old vehicles into autonomous vehicles.
This 'open source project aims to facilitate access to modern autonomous vehicle technologies, for all and for all types of land vehicles.

The two guinea pigs of the project, Peugeot 205 gasoline and electric Bluecar
--

And Navya Autonom Cab vehicles
![]()
A set of Felly software
3D perception, decisions, communication, blackbox, graphic IHM...
completely developed from scratch in C#, C et C++ languages
--

One or two embedded Mini PCs - Windows 10 IoT
Running Felly software + communication with VCU ECU
--

A VCU equipped with an ATMega32 processor
Robotizes the steering wheel, pedals, and lights
monitor the vehicle and communicate with the mini-PC via CAN/RS232
with fully homemade PCB + firmware
--

A set of cameras and sensors
3D and 2D lidars, sonars, radars and cameras
Allowing perception all around the vehicle up to 50m
--

PowerBox, power supply box
Power distribution, filtering and protections
to power FELLY equipment (PC, sensors...)

No dependencies with dominant libraries and software
No PCL, RTmaps, ROS, OpenAI.
and therefore no proprietary updates and paid licenses
With the exception of the manufacturer APIs of certain sensors
natively compiled code for 64-bit platforms, dependent on Net Framework 8 and Windows 10/11
--

Engine and 3D managements
Based on the TZU3D 3D video game engine Tzu3D under DirectX 11/12
to exploit the performance of graphics cards (GPU)
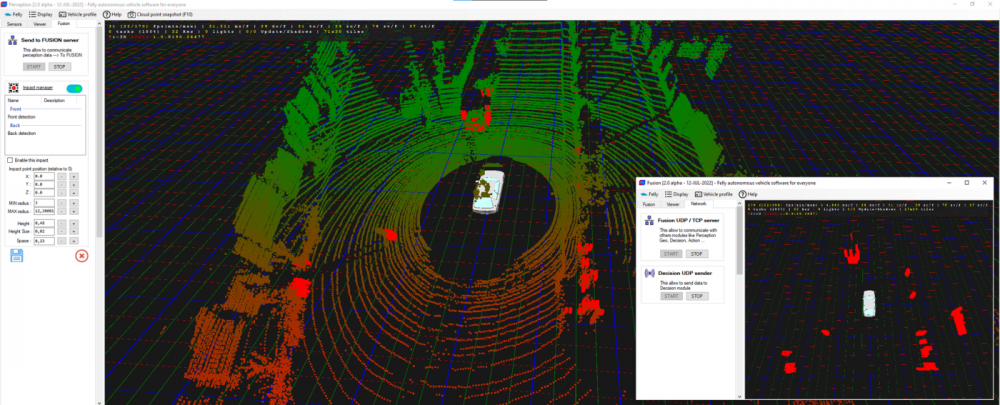
Visualization of impacts (red) from a capture of a Velodyne-128
For more information we invite you to consult The Felly Software project

The first self-driving Bolloré Bluecar

The first self-driving Peugeot 205




![]()
![]()
![]()
